


















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

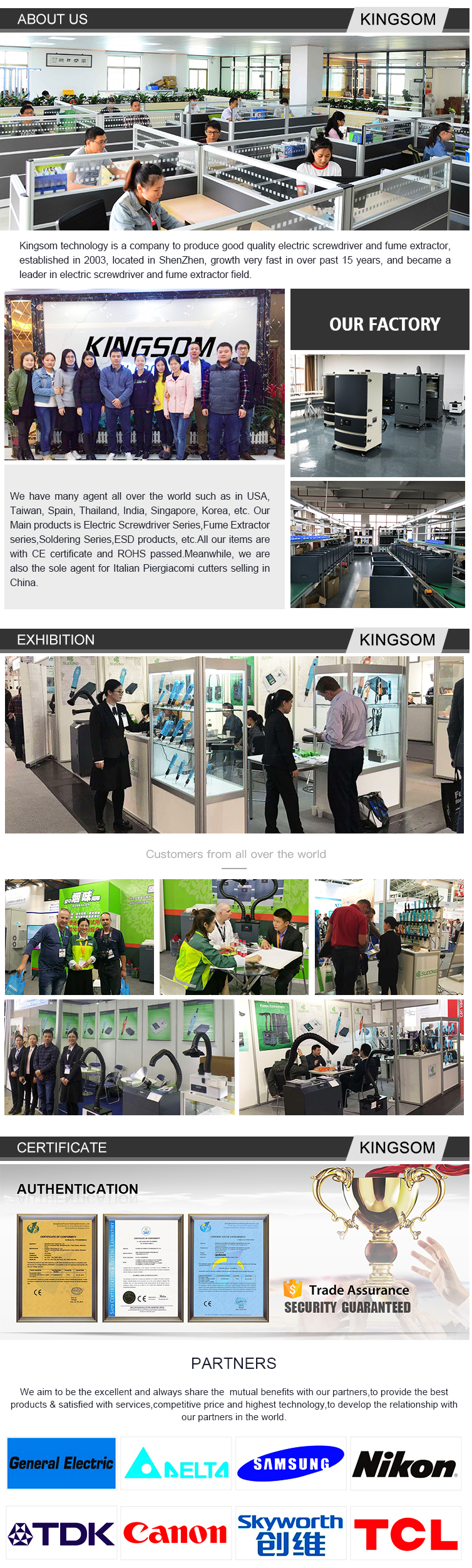
Shenzhen Kingsom Technology Co., Ltd.
marca: Kingsom
Pacote: Caixa de madeira
produtividade: 10000sets/year
transporte: Ocean
Lugar de origem: Shenzhen
Apoio sobre: Strong
Certificados : CE,CCC,ROHS and ISO9001:2008
porta: Shenzhen Port
Tipo de pagamento: L/C,T/T
Incoterm: FOB
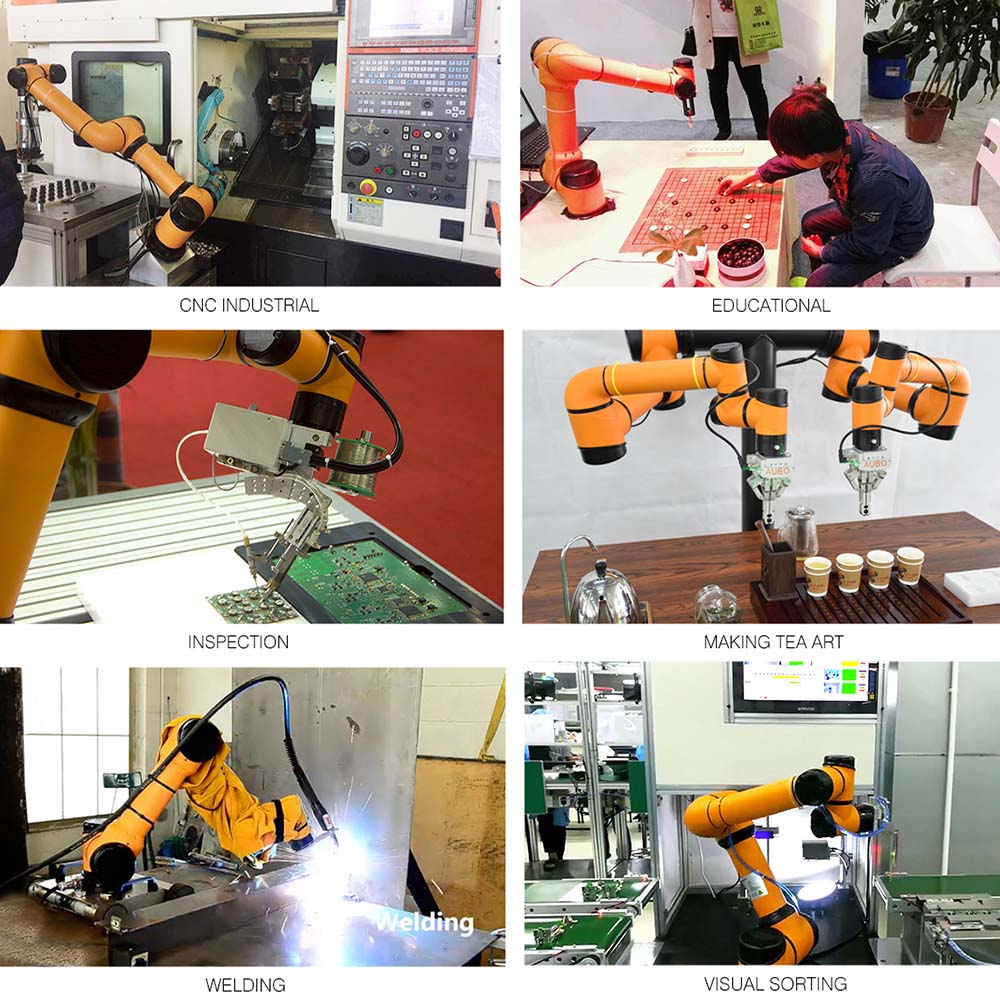
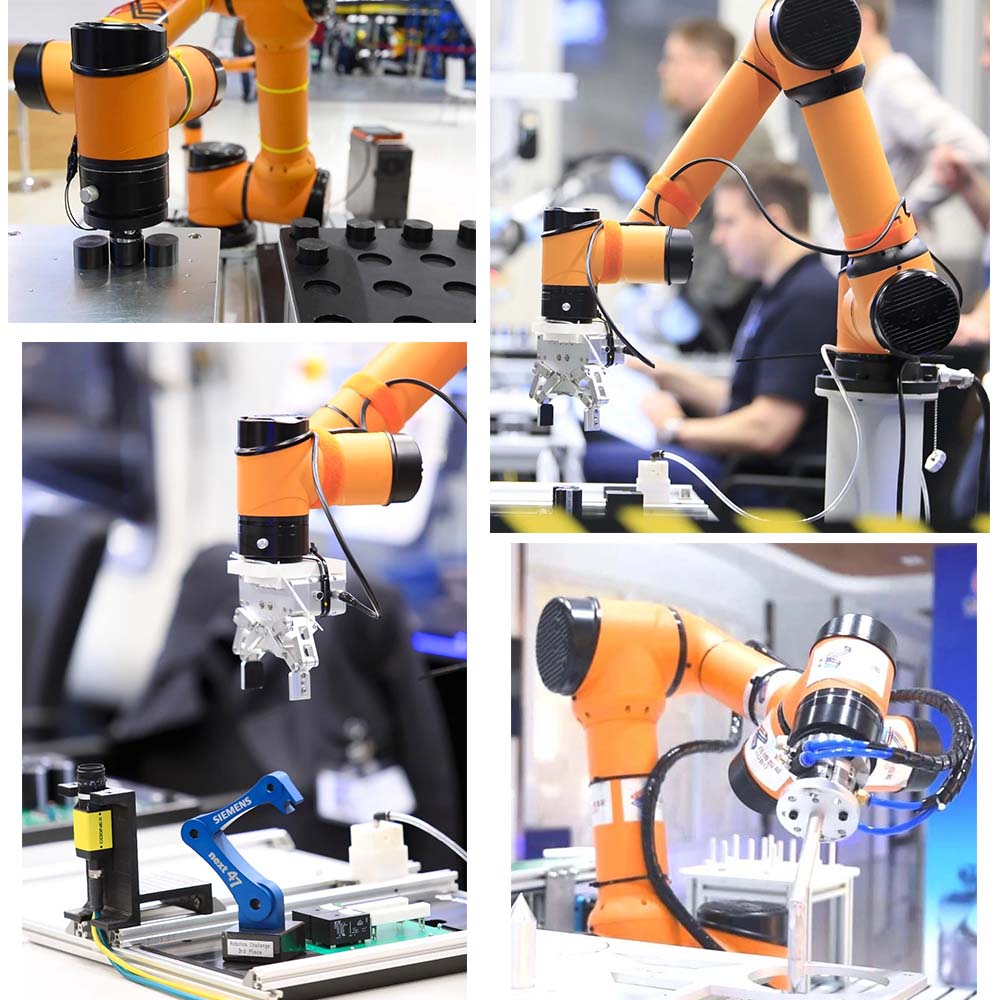
Manipulador industrial do forjamento novo da chegada de Kingsom
Função colaborativa : Guia para ensinar (planejamento de movimento de cinemática inversa), esta operação manual do robô permite programar o robô com rapidez e facilidade, demonstrando sem nenhuma habilidade de programação. Trabalha lado a lado com o operador humano sem barreira de segurança, laser ou sensores (depois que uma avaliação de risco é realizada). A interface de usuário pendente Teach para programação (cinemática direta) permite programação e simulação on-line através de um tablet com tela de toque. Leve, flexível e fácil de reutilizar, este robô pesa menos de 24 kg
Funções de segurança : projetadas de acordo com os requisitos de segurança PLd e ISO 10218-1 (5.10.5 limitadores de força e força) e compatíveis com a maioria das especificações para operação colaborativa de robôs. O projeto de limitação de força e força leva o robô a uma parada protetora se os limites forem excedidos ou uma colisão for detectada. A velocidade e a força podem ser ajustadas para ajustar e otimizar qualquer aplicativo facilmente. Os sensores embutidos nos acionamentos do motor fornecem feedback em tempo real para evitar situações perigosas. Os botões de parada de emergência estão posicionados na caixa de controle e de controle de ensino com uma distância de frenagem menor que 1 mm.
Arquitetura de código aberto: rede de barramento CAN usada neste robô para vários microcontroladores para se comunicarem. O ROS (Sistema operacional do robô) é suportado pela API. O hardware adota protocolos de barramento CAN com extensões de interface de E / S abertas. Integre facilmente o robô aos sistemas de produção existentes.
Retorno sobre o investimento (ROI): baixo custo de propriedade, nenhuma habilidade de programação necessária e facilidade de integração em um sistema resultam em um retorno rápido do seu investimento, o ROI médio é de 3 a 4 meses. Trabalhos de ambiente de curto prazo e alta mistura, como automação de laboratório ou atendimento de máquinas, são exemplos excelentes de indústrias que precisam de uma rápida reimplantação. A área útil é um custo premium na maioria das empresas, geralmente mais do que o equipamento. Um robô leve e com pegada reduzida será um grande benefício para qualquer custo de produção de empresas de qualquer tamanho. Adapte, reimplemente e / ou reinvente aplicativos com o mesmo robô, altere o número de graus de liberdade, as juntas e os tubos são modulares, facilitando a reparação e a reconfiguração.
Inteligência
1. Os sistemas de visão podem ser integrados no controlador.
2. Sistema de software baseado no gerenciamento da plataforma em nuvem que realiza manutenção remota, diagnóstico de falhas e atualização on-line do firmware.
3. Essa plataforma de robô de pesquisa é amplamente utilizada em todo o mundo em laboratórios de pesquisa corporativos e para pesquisa em robótica acadêmica.
Design modular
1. O robô pode ser configurado para ter entre quatro e sete graus de liberdade para atender aos requisitos do usuário.
2. O comprimento da junta pode ser personalizado para links mais longos ou mais curtos.
Além da máquina de braço de robô, nossa empresa também possui muitos produtos, como extrator de fumaça de solda, dispensador de pasta de solda, alimentador pneumático de parafuso manual e alimentador automático de parafuso. Se você precisar desses produtos, entre em contato conosco, responderemos o mais breve possível.
Especificações técnicas
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


Grupo de Produto : Robot Arm Machine > Kingsom New Arrival Forjamento Manipulador Robô Braço Industrial












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.