













Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
marca: Kingsom
Pacote: Papelão de madeira
produtividade: 10000sets/year
transporte: Ocean
Lugar de origem: Shenzhen
Apoio sobre: Strong
Certificados : CE,CCC,ROHS and ISO9001:2008
porta: Shenzhen Port
Tipo de pagamento: L/C,T/T,Paypal,Money Gram,Western Union
Incoterm: FOB,EXW
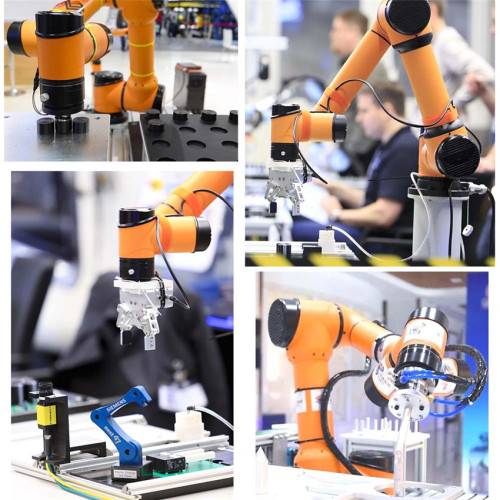
Manipulador de 6 eixos para sistema de automação
Composição do manipulador de forja
Mecanismo de atuação: Inclui as garras, pulsos, braços, colunas e mecanismo de locomoção.
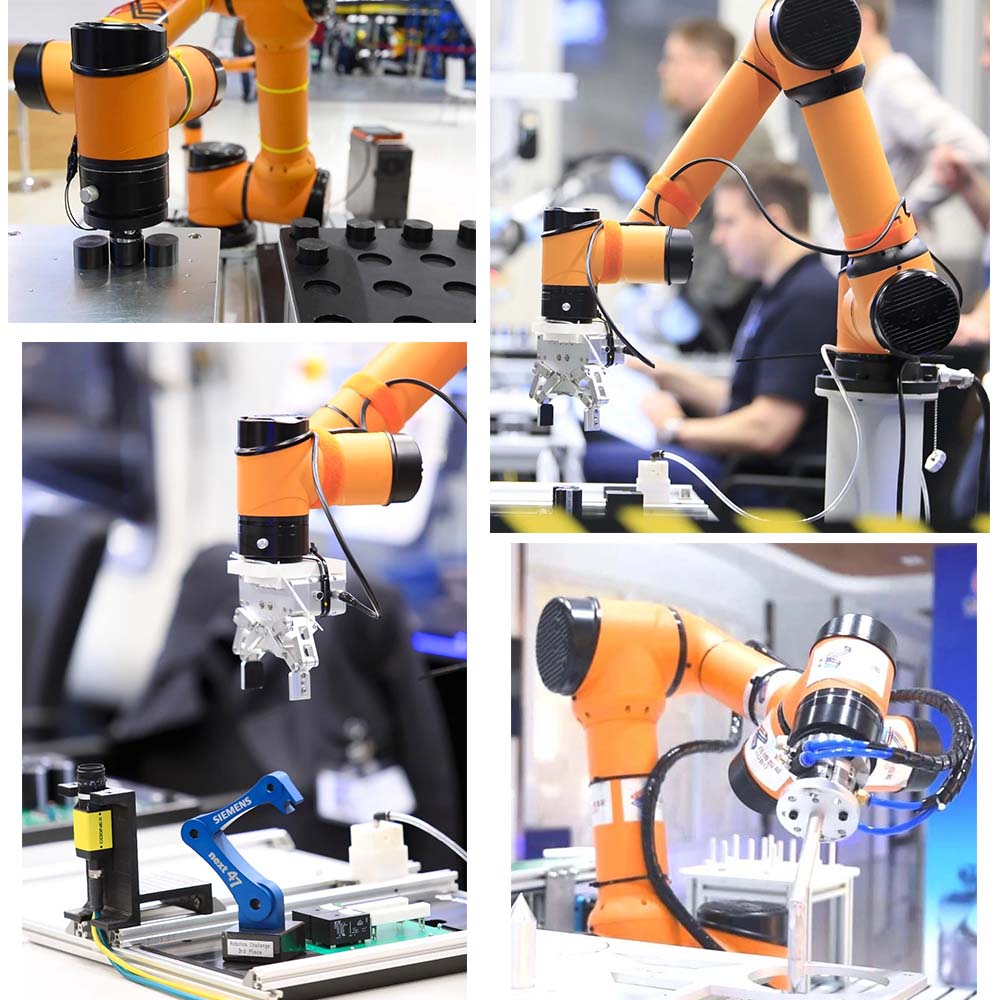
1. Garra
É a peça que fixa a peça de trabalho, semelhante à pinça do manipulador de forja. A forma da garra de fixação é semelhante à de um dedo humano, com ações de fixação e liberação.
2. pulso
É uma parte que conecta a garra e o braço, suporta a garra e ajusta a posição da peça de trabalho fixada no espaço. O pulso geralmente tem três movimentos de arremesso, balançando para a esquerda e para a direita e girando em torno de seu próprio eixo. Alguns manipuladores não têm pulso.
3. Arme
É um componente usado para apoiar a peça de trabalho fixada, garras e punho. Ele pode mover a peça de trabalho de uma posição para outra no espaço de acordo com uma certa trajetória. Geralmente, o braço tem movimentos como extensão para frente e para trás, levantamento para cima e para baixo, rotação para a esquerda e direita e balanço para cima e para baixo.
4. Coluna
É a parte que sustenta o braço. A coluna do manipulador normalmente é fixa, às vezes por necessidade, a coluna também pode ser projetada para ser móvel, chamada de coluna móvel.
5. Mecanismo de caminhada
Quando o manipulador precisa concluir uma operação relativamente longa, um mecanismo de deslocamento, como rolos e trilhos de guia, pode ser instalado na base para realizar o movimento de toda a máquina.
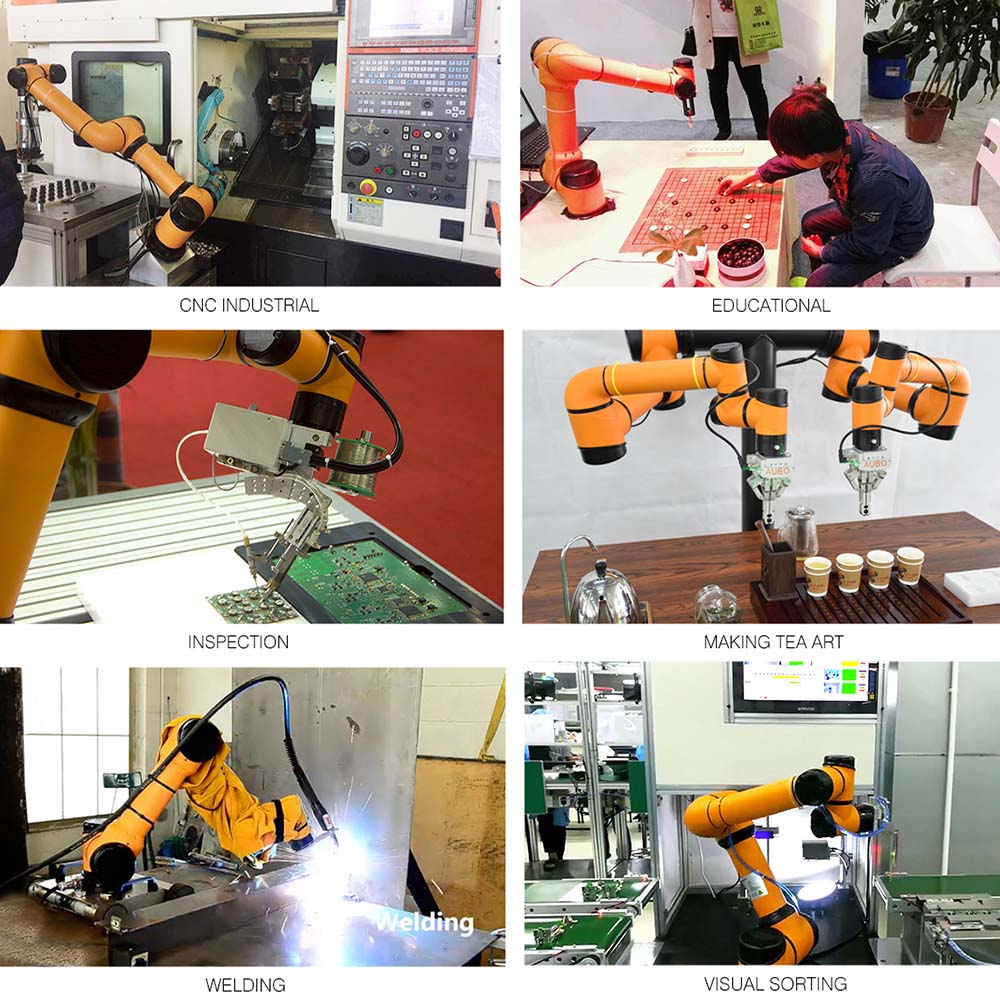
Inteligência
1. Os sistemas de visão podem ser integrados ao controlador.
2. Sistema de software baseado em gerenciamento de plataforma em nuvem que realiza manutenção remota, diagnóstico de falhas e atualização online de firmware.
3. Esta plataforma de robô de pesquisa é amplamente utilizada em todo o mundo em laboratórios de pesquisa corporativos e para pesquisas acadêmicas em robótica.
Design modular
1. O robô pode ser configurado para ter entre quatro e sete graus de liberdade para atender aos requisitos do usuário.
2. O comprimento da junta pode ser personalizado para links mais longos ou mais curtos.
Além da Robot Arm Machine, nossa empresa também tem muitos produtos, tais como Extrator de Fumos de Solda, Distribuidor de Pasta de Solda, Alimentador de Parafuso Manual Pneumático, Alimentador de Parafuso Automático. Se você precisar desses produtos, entre em contato conosco, responderemos o mais breve possível.
Especificações técnicas
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||


Grupo de Produto : Robot Arm Machine > Kingsom New Arrival Forjamento Manipulador Robô Braço Industrial












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.